Απεικόνιση του μέλλοντος
")
Μια φορά κι έναν καιρό, η οπτική επιθεώρηση της υποθαλάσσιας υποδομής σήμαινε δύτες να τραβούν τις κάμερες κάτω στο θαλασσό, ελπίζοντας ότι το περίβλημα της φωτογραφικής μηχανής δεν θα πλημμύριζε ή ότι η ταινία δεν θα ήταν εκτεθειμένη ή καταστραφεί κατά την ανάπτυξη. Ακόμα και με τη χρήση των πρώτων τηλεχειριζόμενων οχημάτων (ROV) με ζωντανή ροή βίντεο, ήταν δύσκολο να εντοπιστεί αρκετά ένας στόχος επιθεώρησης, λόγω περιορισμένης λειτουργικότητας ελέγχου και τοποθέτησης αν υπήρχε κάποιο επίπεδο ρεύματος.
Είναι ασφαλές να πούμε ότι η βιομηχανία έχει προχωρήσει πολύ και οι δυνατότητες απεικόνισης επεκτείνονται την ημέρα. Στην πραγματικότητα, το πρόβλημα τώρα αρχίζει να γίνεται πώς να επεξεργαστεί το "τσουνάμι" των δεδομένων που συλλέγονται.
Τα θέματα αυτά ήταν κορυφαία της ημερήσιας διάταξης σε ένα κοινό σεμινάριο που πραγματοποιήθηκε τον Οκτώβριο από την Υδρογραφική Εταιρεία στη Σκωτία (THSiS), τη Διεθνή Ένωση Θαλασσίων Εργοδοτών (IMCA) και την Εταιρεία Υποβρύχιας Τεχνολογίας (SUT) στο Αμπερντίν τον Οκτώβριο.
Από τη μία πλευρά, οι πλατφόρμες αισθητήρων εξελίσσονται. Και οι δύο ROVs και τα αυτόνομα υποβρύχια οχήματα (AUV) γίνονται ταχύτερα στη χρήση. Η BP έχει ως στόχο να πραγματοποιήσει το 100% των επιθεωρήσεων υποθαλάσσιων επιβατών μέσω των αυτόνομων θαλάσσιων συστημάτων (MAS) μέχρι το 2025, δήλωσε στο σεμινάριο ο Peter Collinson, ανώτερος υποθαλάσσιος και περιβαλλοντικός εξειδικευμένος στην BP στο πετρέλαιο.
Επίσης, καθίστανται πιο αυτόνομες, υποστηριζόμενες από κέντρα διασύνδεσης στη θάλασσα. Η Equinor έχει δοκιμάσει ήδη δοκιμές ROV από τα χερσαία κέντρα (μέσω Oceaneering και IKM) και φέτος είναι έτοιμη να δοκιμάσει το ρομπότ υποβρύχιου φιδιού του Eelume σε ένα υποθαλάσσιο γκαράζ στο Åsgard offshore field της Νορβηγίας. Μέχρι το 2020, ελπίζει να πάει χωρίς τέλη, δήλωσε στο σεμινάριο ο Richard Mills, διευθυντής πωλήσεων, Kongsberg Maritime Robotics. Το επόμενο βήμα θα μπορούσε να χρησιμοποιηθεί σε συνδυασμό με μη επανδρωμένα σκάφη επιφανείας.
Εν τω μεταξύ, οι τεχνολογίες απεικόνισης, από τη λέιζερ μέχρι τη φωτογραμμετρία, βοηθούν αυτές τις πλατφόρμες να συγκεντρώσουν περισσότερα δεδομένα, ταχύτερα και ενδεχομένως να τα βοηθήσουν να πλοηγηθούν.
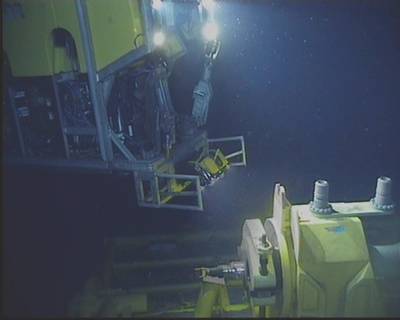 Παρακολούθηση υποθαλάσσιων εργασιών χρησιμοποιώντας σύστημα ORUS3D. (Πηγή: Comex Innovation)
Παρακολούθηση υποθαλάσσιων εργασιών χρησιμοποιώντας σύστημα ORUS3D. (Πηγή: Comex Innovation)
Αρκετά μετρήσιμες εικόνες
Σε πραγματικό χρόνο οι έρευνες γίνονται με φωτογραμμετρία. Το καλοκαίρι του 2018, η Comex Innovation ολοκλήρωσε δύο σχέδια θαλάσσιων επιθεωρήσεων της Βόρειας Θάλασσας, χρησιμοποιώντας την υποβρύχια τεχνολογία φωτογραμμετρίας της ORUS3D, έχοντας κάνει έργα στη Δυτική Αφρική, Raymond Ruth, UK και North Sea Agent for Comex Innovation. Και οι δύο επιχειρήσεις, στο βρετανικό και δανικό τομέα της Βόρειας Θάλασσας, ζήτησαν μέτρηση υψηλής ακρίβειας, μία για τη στήριξη των τροποποιήσεων των βιομηχανικών εγκαταστάσεων.
Το υποβρύχιο οπτικό σύστημα ORUS3D μετράει και στη συνέχεια δημιουργεί 3D μοντέλα υψηλής ανάλυσης των υποθαλάσσιων δομών. Κάθε σύστημα περιλαμβάνει μια ενσωματωμένη δέσμη τριών εστιακών αισθητήρων, με τέσσερις μονάδες φλας LED μεγάλων ακτίνων, καθώς και μονάδα λήψης και επεξεργασίας δεδομένων. Χρησιμοποιεί τριγωνισμό χαρακτηριστικών μέσα στις εικόνες που συλλέχθηκαν για να εντοπίσει τη σχετική θέση και να οικοδομήσει μια ανακατασκευή σύννεφο 3D σημείου που μπορεί να χρησιμοποιηθεί για μέτρηση, έτσι ώστε να μην απαιτείται ένα αδρανειακό σύστημα πλοήγησης ή τοποθέτηση στόχου στο αντικείμενο για κλιμάκωση όταν γίνεται επί τόπου.
Η ενσωματωμένη μονάδα ταιριάζει σε ένα ROV για την ελεύθερη πτήση συλλογή δεδομένων από περισσότερα από 40 εκατοστά μακριά από τις κατασκευές, αν και η καλύτερη απόσταση απέχει 1-2 μέτρα από το αντικείμενο. Αυτό δεν διαρκεί παρά μια γενική έρευνα βίντεο, είπε η Ρουθ.
Η αρχική επεξεργασία σε πραγματικό χρόνο πραγματοποιείται για να εκτιμηθεί η τοποθεσία και η ποιότητα, πριν από την επιτόπια επεξεργασία (στο σκάφος υποστήριξης), για να ελέγχεται περαιτέρω η ποιότητα των δεδομένων και να δημιουργηθεί ένα αρχικό κλιμακωτό μοντέλο 3D σε ακρίβεια cm. Η τελική επεξεργασία των δεδομένων, η οποία συλλέγεται ως δεδομένα σύννεφου σημείου, πραγματοποιείται στη συνέχεια για την ανακατασκευή του τόπου ή του αντικειμένου σε ένα 3D μοντέλο σε mm ακρίβεια.
 Τα αποτελέσματα μιας έρευνας ORUS3D (Πηγή: Comex Innovation)
Τα αποτελέσματα μιας έρευνας ORUS3D (Πηγή: Comex Innovation)
Αυτοματοποιημένη εκδήλωση
Η EIVA εργάζεται για τη χρήση τεχνικών μάθησης και τεχνικών ορατότητας ηλεκτρονικού υπολογιστή για την αυτόματη ανίχνευση αντικειμένων όπως είναι οι ανόδους στους σωλήνες, οι ζημιές στους σωλήνες και η θαλάσσια ανάπτυξη, χρησιμοποιώντας μια συμβατική κάμερα, δήλωσε ο Matthew Brannan, ανώτερος ελεγκτής της EIVA. Για να χρησιμοποιήσετε τη μηχανική μάθηση πρέπει να εκπαιδεύσετε ένα σύστημα με δεκάδες χιλιάδες εικόνες από τους αγωγούς. Αυτό κάνει η EIVA και φέρνει καρπούς. Η εταιρεία διεξήγαγε δοκιμές σε υπάρχοντα σύνολα δεδομένων τα οποία εξομαλύνθηκαν με τον παραδοσιακό τρόπο, έτσι ώστε να είναι δυνατή η σύγκριση των αυτοματοποιημένων αποτελεσμάτων με την τεχνητή εκδήλωση. Στα τέλη του 2018, ξεκίνησε και live δοκιμές κατά τη διάρκεια της λειτουργίας ROV. Ο απώτερος στόχος της τεχνολογίας είναι η αυτόματη αναγνώριση συμβάντων κατά τη διάρκεια μιας έρευνας AUV, επιτρέποντας σε ένα AUV να εντοπίσει κάτι και στη συνέχεια να στείλει ένα μήνυμα σε ένα σκάφος επιφανείας, δήλωσε ο Brannan.
Η EIVA χρησιμοποιεί επίσης συμβατικές κάμερες, χρησιμοποιώντας ταυτόχρονη θέση και χαρτογράφηση (SLAM) και φωτογραμμετρία για να κάνει περιοχές χαρτών, ενώ παράλληλα είναι σε θέση να εντοπίσει τη θέση της φωτογραφικής μηχανής σε σχέση με τη χαρτογράφηση. Τα υπάρχοντα συστήματα SLAM βασίζονται στο κλείσιμο του βρόχου και οι λύσεις φωτογραμμετρίας χρειάζονται μεγάλη αλληλεπικάλυψη εικόνας και καλή ορατότητα και συνήθως δεν είναι σε πραγματικό χρόνο, εξήγησε ο Brannan. Μερικοί επίσης βασίζονται σε δαπανηρές στερεοφωνικές κάμερες, οι οποίες χρειάζονται βαθμονόμηση και καταλαμβάνουν χώρο, είπε.
Η EIVA ονομάζει το σύστημα VSLAM ή οπτική SLAM. Δημιουργώντας ένα σύννεφο χαμηλού σημείου σε περιστροφή, το VSLAM μπορεί να εντοπίσει το περιβάλλον του (δηλ. Το όχημα βρίσκεται επάνω του) και να χρησιμοποιήσει το μοντέλο που δημιουργεί για την αυτόματη παρακολούθηση και σάρωση δομών υποθαλάσσιου. Αυτό είναι δυνατό με μία μόνο κάμερα, όπως είπε ο Brannan, και από εικόνες ή εικόνες που εξάγονται από το βίντεο, εντοπίζοντας σημεία σε κάθε εικόνα και εκτιμώντας ένα κομμάτι, χρησιμοποιώντας αυτά τα σημεία, για να δημιουργηθεί το σύννεφο μικρών σημείων δημιουργώντας ένα ψηφιακό μοντέλο εδάφους. Ένα AUV θα γνώριζε επίσης την αρχική απόλυτη θέση του και θα μπορούσε στη συνέχεια να χρησιμοποιήσει σημεία διαδρομής (δηλαδή ορόσημα) κατά μήκος της διαδρομής.
Το σημείο σύννεφο μπορεί στη συνέχεια να χρησιμοποιηθεί για να δημιουργήσει ένα πυκνό σύννεφο 3D σημείο και στη συνέχεια ένα πλέγμα, με το χρώμα και την υφή που προστίθενται. Η EIVA έχει μια ομάδα που εργάζεται για αυτό από το 2017 και τώρα δοκιμάζει το σύστημα σε AUVs. Αυτή τη χρονιά, θα εκτελεί ζωντανά έργα, με οπτική πλοήγηση, δήλωσε ο Brannan, και μετά, θέλει να βοηθήσει την αυτόνομη επιθεώρηση και την ελαφρά επέμβαση.
subSLAM
Η Rovco έχει ένα όραμα να αναπτύξει ένα AUV με αυτόνομο επιφανειακό όχημα (ASV) για να πραγματοποιήσει έρευνες και να χαρτογραφήσει με την τεχνολογία ζωντανής τρισδιάστατης εικόνας και χαρτογράφησης της SubSLAM. Το SubSLAM επιτρέπει σε ένα ROV να χτίσει έναν τρισδιάστατο χάρτη του περιβάλλοντος του, χωρίς να χρησιμοποιεί άλλα αδρανειακά συστήματα πλοήγησης ή εντοπισμού θέσης. Η εταιρεία την καλεί να ζήσει 3D όραση στον υπολογιστή.
 Η ζωντανή ιδέα SubSLAM της Rovco (Πηγή: Rovco)
Η ζωντανή ιδέα SubSLAM της Rovco (Πηγή: Rovco)
Η τεχνολογία SubSLAM X1 Smart Camera της Rovco χρησιμοποιεί ένα σύστημα διπλής κάμερας για να δημιουργήσει ένα σύννεφο ζωντανών σημείων από αυτό που βλέπει. Στη συνέχεια χρησιμοποιείται για τον υπολογισμό της θέσης του οχήματος σε σχέση με αυτό που βλέπει.
Η Rovco χρησιμοποιεί το SubSLAM σε παρατηρητήριο ROV του Sub-Atlantic Mojave, αλλά το καθιστά συμβατό με άλλες πλατφόρμες, δήλωσε ο Joe Tidball. Η εταιρεία σχεδιάζει να αποκτήσει το πρώτο AUV, Sabertooth, από τη Saab Seaeye, φέτος, ενσωματώνοντας το SubSLAM το 2020 και στη συνέχεια να δημιουργήσει τεχνητή νοημοσύνη (AI) στο σύστημα το 2021. Στη συνέχεια ψάχνει να παραδώσει έρευνες από ένα ASV από το 2022.
Ο Tidball δήλωσε ότι το σύστημα είναι κατάλληλο για υποθαλάσσια μετρολογία και θα μπορούσε να χρησιμοποιηθεί με ένα όχημα χωρίς ζώνη χρησιμοποιώντας ακουστικές επικοινωνίες συνδεδεμένες με μια πύλη επικοινωνίας επιφάνειας με ραδιοφωνικά / κυψελοειδή ή δορυφορικά δίκτυα και στη συνέχεια με το cloud, όπου οι μηχανικοί θα μπορούσαν να έχουν πρόσβαση σε ένα εργαλείο μέτρησης βασισμένο στον browser - τροφοδοτείται με ζωντανά δεδομένα 3D. Με το AI, το όχημα θα μπορούσε να κάνει τις ίδιες εκτιμήσεις.
Η Rovco εξέτασε το σύστημα SubSLAM στο Καταπέλτη Υπεράκτιας Ανανεώσιμης Ενέργειας στο Blyth της Βορειοανατολικής Αγγλίας τον Αύγουστο του 2018. Η Tidball ανέφερε ότι η εταιρεία αξιολόγησε την ακρίβεια μέτρησης που θα μπορούσε να επιτύχει χρησιμοποιώντας δεδομένα επίγειας έρευνας σχετικά με δομές σε ξηρή αποβάθρα, δουλεύει σε ορατότητα 1,2 μ. Τα υποβρύχια δεδομένα συγκρίθηκαν με μια ανίχνευση λέιζερ. Σε σύγκριση με τις δύο ώρες που έγιναν για υπαίθρια έρευνα, με σφάλμα ευθυγράμμισης 1,7 χιλιοστών, το SubSLAM πέτυχε σφάλμα 0,67 χιλιοστών, από σάρωση δύο λεπτών, δήλωσε ο Tidball.
Ο Tidball είπε ότι το σύστημα θα μπορούσε να αναιρέσει την ανάγκη για συστήματα μακράς βάσης (LBL), για την ακρίβεια τοποθέτησης, αλλά δήλωσε ότι η ορατότητα ήταν ένας παράγοντας για να λειτουργούν οι κάμερες. Ενώ η τεχνολογία είναι σε θέση να τοποθετήσει το ROV ή AUV μέσα στο περιβάλλον του, εάν μετακόμισε σε άλλη τοποθεσία και ήταν χωρίς ταινία, θα χρειαζόταν αδρανειακή πλοήγηση.
Επιστροφή στο μέλλον
Οι τεχνικές που χρησιμοποιούνται για τη δημιουργία σημειακών σύννεφων μπορούν επίσης να χρησιμοποιηθούν για τη δημιουργία σημειακών σύννεφων από υπάρχουσες εικόνες ή βίντεο, δήλωσε ο Dr. Martin Sayer, διευθύνων σύμβουλος της Tritonia Scientific με έδρα τη Σκωτία. Για παράδειγμα, η Tritonia χρησιμοποίησε την τεχνολογία της ως μέρος μιας καθαρής ανάλυσης περιβαλλοντικών ωφελειών ενός σακακιού πλατφόρμας σε μια τροπική τοποθεσία, όπου ο χειριστής ήθελε να καθορίσει πόση επιπλέον θαλάσσια ανάπτυξη θα έδινε σε ένα μπουφάν, για ανύψωση υπολογισμών λειτουργίας και διάθεση στην ξηρά σχεδίαση. Τρίτονα δόθηκε το υπάρχον ROV υλικό για να αξιολογήσει. Αυτό είχε ληφθεί για έρευνες σχετικά με τη ζωή των ψαριών, όχι βιοσυγκόλληση σακουλών, επομένως δεν σχεδιάστηκε ή προοριζόταν για 3D μοντελοποίηση. Δύο κάμερες HD και μια τυπική κάμερα είχαν τοποθετηθεί στο ROV, αριστερά, δεξιά και κεντρικά.
Λόγω του φωτός στο νερό και του μεγαλύτερου μέρους του υλικού που στρέφεται προς τα ψάρια, το 95% περίπου του δεν ήταν χρήσιμο. Το υπόλοιπο πυροβολήθηκε τη νύχτα, καθιστώντας το πιο κατάλληλο, χωρίς επιφανειακή παρεμβολή και καλύτερη αντίθεση, επιτρέποντας την πλήρη πληρέστερη διατομή του ποδιού. Αφαιρώντας τον γνωστό όγκο ποδιού από το μοντέλο, υπολογίζεται ο όγκος θαλάσσιας ανάπτυξης.
Σε κίνηση
Για κάποιους, το πραγματικό δυναμικό όλων αυτών των τεχνολογιών είναι να μπορούν να επεξεργάζονται δεδομένα ζωντανά και να χρησιμοποιούν αυτές τις πληροφορίες για να ανατροφοδοτούν σε ζωντανά (αν και εποπτευόμενα) αυτόνομα συστήματα.
Υπάρχει ένας βρόχος ανατροφοδότησης που θα κάνει αυτές τις λειτουργίες πιο ισχυρές. "Η επεξεργασία των δεδομένων [που συλλέγουμε] αυτόματα είναι όταν έχουμε αξία", δήλωσε ο Nazli Deniz Sevinc, επικεφαλής του προγράμματος uROV, OneSubsea. "Επιπλέον, είναι ένας βρόχος ανατροφοδότησης στους εποπτευόμενους αλγόριθμους αυτονομίας και ανίχνευση χαρακτηριστικών", όπως συζητήθηκε ο Brannan.
Πολλά συμβαίνουν. Η επίβλεψη της αυτονομίας, η αυτόνομη ανίχνευση σφαλμάτων, οι μη επανδρωμένες λειτουργίες, χωρίς την ανάγκη για σκάφη υποστήριξης, είναι ο στόχος. Υπάρχουν εμπόδια, όπως η νομοθεσία, η οποία στον τομέα των μη επανδρωμένων συστημάτων πλοίων βρίσκεται πίσω από την τεχνολογία που είναι διαθέσιμη. Υπάρχουν προβλήματα σχετικά με τα πρότυπα δεδομένων και τον τρόπο χειρισμού της ποσότητας των δεδομένων που δημιουργούνται και, κυρίως, την προσαρμογή αυτών των τεχνικών στις τρέχουσες ροές εργασιών (ή την προσαρμογή των ίδιων των ροών εργασίας). Είναι ένας γρήγορος κινούμενος χώρος για να παρακολουθήσετε με ένα τεράστιο ποσό θολών ορίων (αν όχι εικόνων).
Δεδομένα Τσουνάμι
Οι νέες τεχνολογίες απεικόνισης δημιουργούν νέες ευκαιρίες για υποβρύχια απεικόνιση και αυτονομία. Δημιουργούν επίσης μια πρόκληση "δεδομένων τσουνάμι" για τους φορείς εκμετάλλευσης. Ο Peter Collinson, από την BP, δήλωσε: "Μία από τις μεγαλύτερες ανησυχίες είναι (ότι) όταν αρχίζετε να στέλνετε στόλους AUVs έξω εκεί, θα έχουμε ένα τσουνάμι δεδομένων που έρχονται σε μας. Έχουμε επικεντρωθεί σε πλατφόρμες [αισθητήρων / ερευνών], διότι εξακολουθούμε να χτίζουμε εμπιστοσύνη σε αυτά που τα συστήματα αυτά και τι μπορούν να κάνουν. Το κομμάτι των δεδομένων έρχεται ... με την έγκαιρη αντιμετώπιση αυτών των δεδομένων. Πώς σχηματίζουμε ένα ψηφιακό δίδυμο και μπορούμε να περάσουμε στην πρόβλεψη, την αυτοματοποιημένη ανίχνευση αλλαγών χρονοσειρών; "
Ενώ η συλλογή δεδομένων εξελίσσεται με ταχύ ρυθμό, η μελλοντική εστίαση είναι στην παροχή δεδομένων στους ανθρώπους που την χρειάζονται, όπως οι μηχανικοί αγωγών, σε μορφή που έχει νόημα και χρησιμότητα. Η Τεχνητή Νοημοσύνη (AI) θα βοηθήσει, δήλωσε ο Malcolm Gauld, από το Fugro, χρησιμοποιώντας cloud computing και ανιχνεύοντας αυτόματα ανωμαλίες ή ελαττώματα. Αλλά θα χρειαστεί χρόνος για την ανάπτυξη συστημάτων, είπε. Ο Fugro εργάζεται σε αυτό και έχει πραγματοποιήσει δοκιμές στο Περθ, οι οποίες βοήθησαν να εγείρουν ζητήματα με το AI, όπως η διαφοροποίηση μιας αργυρόχρωμης επικάλυψης από ένα καρχαρία. Τα μελλοντικά βήματα περιλαμβάνουν την αυτονομία του κτιρίου σε αυτό το AI. Αλλά, ο Gauld πρότεινε ότι θα πρέπει να εξεταστούν και νέα μοντέλα. Θα μπορούσαν οι αγωγοί να κατασκευαστούν με αισθητήρες, καθιστώντας το «έξυπνο» από την αρχή με όλες τις προβλέψεις συντήρησης, ρώτησε. "Στο μέλλον δεν πρόκειται για το είδος του εξοπλισμού που χρησιμοποιείτε για να αποκτήσετε αυτά τα δεδομένα, αλλά τι αποκτάτε από αυτά τα δεδομένα".
Στην πραγματικότητα, στο μέλλον, δεν θα εξετάσουμε καν αυτά τα στοιχεία, πρότεινε ο Joe Tidball, ανώτερος επιθεωρητής της Rovco. Η τεχνητή νοημοσύνη, η ρομποτική, θα κάνει την ερμηνεία και τη λήψη αποφάσεων. "Δεν νομίζω ότι σε 10 χρόνια θα εξετάσουμε το βίντεο πια. Θα λάβουμε απλά μηνύματα ηλεκτρονικού ταχυδρομείου από ρομπότ στη Βόρεια Θάλασσα λέγοντας ότι πρέπει να κοιτάξετε το XYZ. "
Έλεγχος γρήγορου αγωγού
Για έρευνες αγωγών, η BP έχει επικεντρωθεί στην ταχύτερη διεξαγωγή των εργασιών. Το 2017, η BP σύναψε DeepOcean, χρησιμοποιώντας ένα "Fast ROV" (που απεικονίζεται παραπάνω, Superior ROV από το Kyst Design της Νορβηγίας) για να ερευνήσει 478 χιλιόμετρα αγωγού (παρακάτω), μεταξύ των εγκαταστάσεων Clair και Magnus στη Βόρεια Θάλασσα έως το Sullom Voe Terminal, Το Shetland, και από τις εγκαταστάσεις Brent και Ninian μέχρι το Magnus, όλα σε λιγότερο από τέσσερις ημέρες. Η έρευνα περιελάμβανε κάμερες λέιζερ, κάμερες φωτογραφικών μηχανών υψηλής ανάλυσης (HD) και συστήματα ανίχνευσης κατακόρυφης κατακόρυφης προστασίας (CPs) στην περιοχή των επιπέδων πεδίου (FIGS) και μέσος χρόνος επιθεώρησης 5.1kt / ώρα, 6x ταχύτερος από τον κανονικό ROV και 5 φορές ταχύτερος από τον τροποποιημένο πρότυπο ROV. . Περιέχει επίσης στοιχεία μετεγγραφής και πολλαπλών δεδομένων. Το τελικό αποτέλεσμα ήταν ένα αρχείο τρισδιάστατης στρώσης σκηνής, ένα 2D georeferenced μωσαϊκό και καταχωρίσεις συμβάντων / ανωμαλιών.
 Ένας σχεδιασμός Kyst Superior ROV που αναπτύχθηκε για την έρευνα αγωγών της BP από την DeepOcean (Πηγή: BP)
Ένας σχεδιασμός Kyst Superior ROV που αναπτύχθηκε για την έρευνα αγωγών της BP από την DeepOcean (Πηγή: BP)
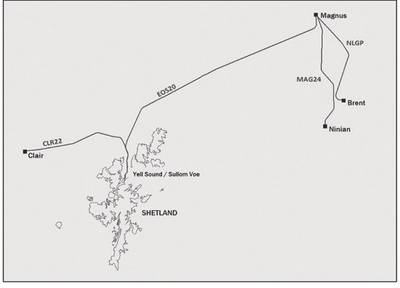 Το σύστημα αγωγών που εξετάστηκε σε διάστημα τεσσάρων ημερών (Πηγή: BP)
Το σύστημα αγωγών που εξετάστηκε σε διάστημα τεσσάρων ημερών (Πηγή: BP)
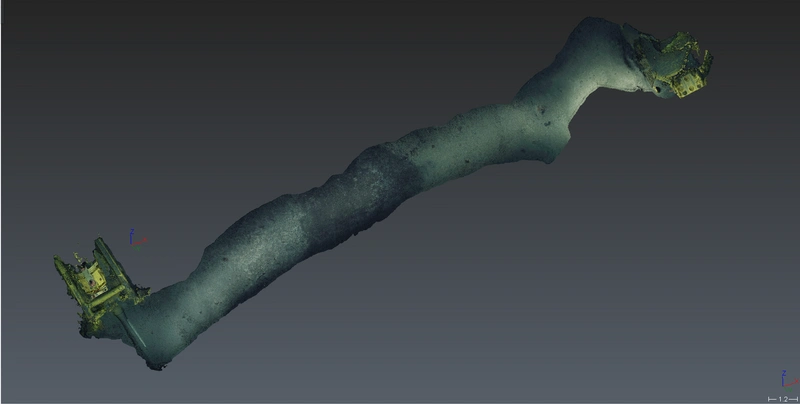
 Ένα τμήμα του αγωγού που απεικονίζεται στην έρευνα (Πηγή: BP)
Ένα τμήμα του αγωγού που απεικονίζεται στην έρευνα (Πηγή: BP)
Stretching ακουστική
Η εταιρεία Schlumberger OneSubsea εργάζεται σε ένα έργο που ονομάζεται uROV. Στόχος του είναι ένα υποθαλάσσιο όχημα που δεν κατοικεί, με εποπτευόμενη αυτονομία, που σημαίνει ότι είναι σε θέση να επικοινωνεί μέσω βίντεο με το όχημα από την ακτή. Όμως, ενώ τα διαθέσιμα 4G κυψελοειδή δίκτυα ανοιχτής τηλεφωνικής επικοινωνίας μέσω του αέρα, μέσω των συνδέσεων βίντεο βίντεο δεν είναι τόσο εύκολο, ο Nazli Deniz Sevinc, επικεφαλής του προγράμματος uROV, OneSubsea, δήλωσε στην Εταιρεία Υποβρύχιας Τεχνολογίας (SUT) (IMCA) και το Κοινό σεμινάριο της υδρογραφικής κοινότητας στη Σκωτία (THSiS) τον Οκτώβριο.
Το πρόγραμμα uROV της OneSubsea σκοπεύει να χρησιμοποιήσει ένα όχημα Saab Seaeye Sabertooth, τοποθετημένο με τεχνολογίες Schlumberger. Το όραμα uROV βρίσκεται κάπου μεταξύ ενός AUV και ενός χειροκίνητου ROV, προσφέροντας ανεξέλεγκτη αλλά εποπτευόμενη αυτονομία, δήλωσε ο Sevinc. Αυτό θα συνεπαγόταν την ύπαρξη ενός "ανθρώπου στον βρόχο", ενώ θα λειτουργεί σε αποστάσεις μέχρι 3 χλμ. Από μια πύλη επικοινωνίας επιφάνειας, π.χ. μια μη επανδρωμένη επιφάνεια. Όταν βρίσκεται κοντά σε υποθαλάσσια υποδομή, θα έχει επίσης μια σύνδεση δεδομένων μέχρι και 200 μέτρων μέσω του νερού.
Αυτό θα επιτρέψει την πρόσβαση σε υποθαλάσσια οχήματα 24/7. Αλλά, αυτό σημαίνει ότι χρειάζεστε subsea wi-fi, προηγμένη αίσθηση, οπτική ανίχνευση, προηγμένο έλεγχο και αυτόματη ανάλυση. Ο Sevinc είπε ότι το uROV θα χρησιμοποιήσει το EIVA Navisuite για προγραμματισμό της αποστολής και ένα στρώμα αυτονομίας που θα αναπτυχθεί για το Sabertooth. Όμως, αυτό βασίζεται σε ανατροφοδότηση σε πραγματικό χρόνο, η οποία βασίζεται σε επικοινωνίες.
Για τις πράξεις των βιομηχανικών εγκαταστάσεων, το uROV στοχεύει στην ακουστική επικοινωνία, που σημαίνει εγγενώς χαμηλός ρυθμός δεδομένων. Το OneSubsea, μέσω της βάσης του Boston Schlumberger, έχει δουλέψει για το πόσα δεδομένα μπορεί να αποσπάσει μέσω των 100kpbs. Το 2017, ο Sevinc δήλωσε ότι η εταιρεία πέτυχε μεταφορά βίντεο από πλοίο σε σκάφος μέσω ακουστικού καναλιού με ταχύτητα 100kbps πάνω από 1χλμ. Στη συνέχεια πέτυχε παρόμοια αποτελέσματα με μια κάθετη μεταφορά. Ο Sevinc είπε ότι αυτό είναι ένα ανώτατο όριο για το βίντεο, ενώ το υπόλοιπο εύρος ζώνης χρησιμοποιείται για τις εντολές. Σε όλη τη διάρκεια του 2018, αυτή η δυνατότητα ενσωματώθηκε στο uROV, με σχέδια να αναπτύξει την ικανότητα μεταφοράς δεδομένων βίντεο μέσω 3km φέτος και την πραγματική ανάπτυξη μέχρι το τέλος του έτους. Ένα άλλο κιτ που ενσωματώνεται στο uROV περιλαμβάνει την τεχνολογία λέιζερ LiDAR (ανίχνευση και εύρεση φωτός) από 3D σε βάθος.
Η Serica ολοκληρώνει την εξαγορά περιουσιακών στοιχείων στη Βόρεια Θάλασσα από την ONE-Dyas
-171360 "(Πίστωση: Serica Energy)")
Η Petrobras εισέρχεται στο κοίτασμα Itaimbezinho, που λειτουργεί από την Equinor, στα ανοιχτά της Βραζιλίας

Η OneSubsea θα παραδώσει σύστημα υποθαλάσσιας ενίσχυσης για το Thunder Horse της BP
-171237 "(Πίστωση: SLB)")
Η Eni εισέρχεται στην Γκάμπια με άδεια υπεράκτιας εξερεύνησης πετρελαίου και φυσικού αερίου
-171198 "Εικονογράφηση (Πίστωση: Eni)")
Οι υπεράκτιες γεωτρήσεις στο Ομάν αντιμετωπίζουν περαιτέρω καθυστερήσεις

-171164 "(Πίστωση: Masirah Oil)")
Η Saipem ολοκληρώνει την ανύψωση βασικών μονάδων για το υπεράκτιο έργο φυσικού αερίου της Λιβύης
")
Σετ ημι-υποβρυχίων γεωτρήσεων Transocean Equinox για επιχειρήσεις γεώτρησης στα ανοιχτά της Αυστραλίας
")
Σκανδιναβοί επενδυτές προς την ΕΕ: Απορρίπτεται η ιδέα των γεωτρήσεων στην Αρκτική

Η Karoon επανεκκινεί την παραγωγή στο βραζιλιάνικο πεδίο μετά την ανακαίνιση του FPSO
-170882 "FPSO στο πεδίο Baúna (Πίστωση: Karoon Energy)")
Η Wison ξεκινά την κατασκευή επιφανειακών όψεων για την πετρελαϊκή μονάδα βαθιάς ύδρευσης Sakarya της Τουρκίας
-170704 "(Πίστωση: Wison New Energies)")
Η Eco Atlantic προωθεί την επέκταση των ανοικτών ακτών των Φώκλαντ με συμφωνία JHI
-Oil-amp-Gas)
-170668 "(Πίστωση: Eco (Atlantic) Oil & Gas)")
Η ADES υπέγραψε συμβόλαιο 48 εκατομμυρίων δολαρίων στη Νιγηρία για την πλατφόρμα Main Pass IV
")